STS-123
| Missionsemblem | |||||
|---|---|---|---|---|---|
 | |||||
| Missionsstatistik | |||||
| Missionsnavn: | STS-123 | ||||
| Rumagentur: | NASA | ||||
| Rumfærge: | Endeavour (21) | ||||
| Affyringsrampe: | LC-39A (KSC) | ||||
| Opsendelse: | 11. marts 2008 | ||||
| Landing: | 27. marts 2008 | ||||
| Landet på: | KSC | ||||
| Varighed: | 15 dage og 18 timer | ||||
| Foto af besætningen | |||||
 | |||||
| Navigation | |||||
| |||||
STS-123 (Space Transportation System-123) var rumfærgen Endeavours 21. mission, opsendt d. 11. marts 2008 og vendte tilbage d. 27. marts 2008.
Hovedformålet med missionen var at rumfærgen medbragte det første modul af det japanske rumlaboratorium Kibō (ELM – Experiment Logistics Module[1]) og den canadiske robotarm Dextre (Special Purpose Dexterous Manipulator) til Den Internationale Rumstation.
Opsætningen af Kibō fuldføres først på mission STS-127 i 2009 hvor det tredje delmodul medbringes.
Fem rumvandringer blev fuldført på missionen der varede i næsten 16 døgn, den hidtil længste rumfærge mission.
STS-123 var den 30. rumfærgeopsendelse om natten og den 22. natlanding.
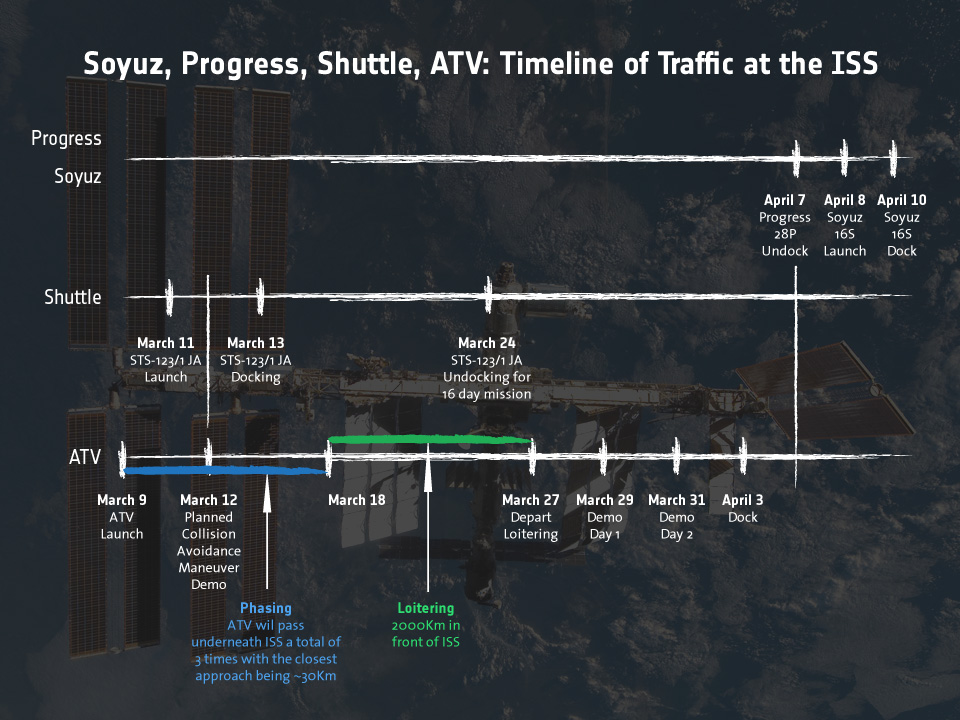
Der er høj aktivitet i rummet før, under og efter STS-123's mission[2][3].
- Endeavours STS-123 mission forventes at vare fra 11. marts til 27. marts.
- ATV fartøjet Jules Verne fra ESA blev opsendt fra Kourou i Fransk Guyana 9. marts klokken 05:03 dansk tid, skal kobles til rumstationen kort efter Endeavours afgang fra rumstationen.
- Det russiske fragtfartøj Progress M-63 (28P) med planlagt afgang fra rumstationen d. 7. april.
- Det russiske Sojuz TMA-12 (16S) fartøj med planlagt opsendelse fra Bajkonur-kosmodromen i Kasakhstan d. 8. april og forventes at kobles til rumstationen d.10. april.
Endeavour og Sojuz er bemandede fartøjer, mens Progress og ATV er ubemandede transportfartøjer. Det er højst usædvanligt at så mange rumfartøjer har afgang og ankomst til Den Internationale Rumstation indenfor så snævert et tidsrum. Det er ATV-fartøjets første tur i rummet og det kan være forbundet med lidt usikkerhed- der er afsat ekstra dage til at afprøve manøvrer i sikker afstand af rumstationen.
Efter missionen skal Endeavour klargøres til at være redningsfartøj for Atlantis på mission STS-125. På denne mission skal Atlantis besøge Hubble-rumteleskopet og redningsfartøjet skal være klar i tilfælde af problemer. Redningsfartøjer benyttes til missioner der ikke besøger Den Internationale Rumstation.
Besætning

 Dominic Gorie (kaptajn)
Dominic Gorie (kaptajn)- Gregory Johnson (pilot)
- Robert Behnken (1. missionsspecialist)
- Michael Foreman (2. missionsspecialist)
- Richard Linnehan (3. missionsspecialist)
 Takao Doi (JAXA) (4. missionsspecialist)
Takao Doi (JAXA) (4. missionsspecialist)
Opsendes:
- Garrett Reisman – ISS Ekspedition 16 – 4. del
Hjemflyvning:
 Léopold Eyharts (ESA) – ISS Ekspedition 16 – 3. del
Léopold Eyharts (ESA) – ISS Ekspedition 16 – 3. del
Missionen
 Kibō. Japanese Experiment Module (JEM). Kibō betyder håb.
Kibō. Japanese Experiment Module (JEM). Kibō betyder håb.
11. marts
Opsendelsen d. 11. marts 2008 klokken 07:28 dansk tid (2:28 i Florida[4]). Der blev rapporteret om ubetydelige problemer efter start[5].
12. marts
Indsamling af data om tilstanden af rumfærgens varmeskjold hvor fartøjets forlængede robotarm tager billeder af rumfærgens udvendige side. Kort før sammenkoblingen med ISS fotograferes rumfærgens underside af besætningen på ISS, rumfærgen foretager en såkaldt "flip-manøvre"[6].
Billederne sendes til Jorden for at blive analyseret af eksperter. Der går flere dage før det kan siges med sikkerhed om varmeskjoldet har taget skade. De foreløbige oplysninger er at der var noget nedfald under opsendelsen, men det er endnu uvist om udgør det problem når rumfærgen skal genindtræde i Jordens atmosfære ved missions afslutning[7].
13. marts
Endeavour sammenkobles med ISS klokken 5:20 dansk tid[8].
1. Rumvandring udført af Richard Linnehan og Garrett Reisman (påbegyndte sen aften og afsluttede 14. marts – dansk tid).
På rumvandringen påbegyndtes opsætningen af Dextre.
14. marts
Last flyttes fra Endeavour til ISS.
15. marts
2. Rumvandring udført af Richard Linnehan og Michael Foreman (påbegyndte sen aften og afsluttede 16. marts – dansk tid).
- På rumvandringen fortsættes opsætningen af Dextre.
16. marts
Last flyttes fra Endeavour til ISS.
17. marts
3. Rumvandring udførtes af Richard Linnehan og Robert Behnken (påbegyndte sen aften og afsluttede 18. marts – dansk tid).
- Materials International Space Station Experiment (MISSE) forsøges flyttes til Columbusmodulet, flytningen mislykkedes og udskydes til den 5. Rumvandring.
- Sidste opsætning af Dextre på denne mission, resten af opsætningen skal færdiggøres på mission STS-124.
18. marts
Aktiviteter med robotten Dextre. Hviledag for rumfærge-besætningen.
19. marts
Hviledag.
20. marts
4. Rumvandring udført af Robert Behnken og Michael Foreman.
- Forsøg med ny metode til reparation af varmeskjold.
21. marts
Sidste inspektion af varmeskjoldet med rumfærgens særlige robotarm Orbiter Boom Sensor System (OBSS).
22. marts
5. Rumvandring udført af Robert Behnken og Michael Foreman.
- Rumfærgens særlige robotarm Orbiter Boom Sensor System (OBSS) afmonteres og placeres på ISS.
- Materials International Space Station Experiment (MISSE) flyttes til Columbusmodulet.
23. marts
Hviledag.
24. marts
Endeavour frakobling fra ISS forberedes, dørene lukkes mellem rumfærgen og ISS med rumfærgebesætningen om bord på Endeavour. Endeavour frakobling fra ISS var planlagt til 00.56 dansk tid, frakoblingen skete 01.30 dansk tid. (påbegyndte sen aften og afsluttede 25. marts – dansk tid).
25. marts
Forberedelser til genindtræden i Jordens atmosfære.
26. marts
Forventet landing på Kennedy Space Center 00.04 dansk tid. (påbegyndte sen aften og afsluttede 27. marts – dansk tid).
27. marts

Endeavour landede sikkert et par timer efter det planlagte tidspunkt[9]. Stikflammer slikkede op ad halen på Endeavour efter landingen. Dette er normalt, men var særligt dramatisk i nattemørket. Rumfærgens tre hjælpeaggregater producerer hydraulisk tryk til rorfladerne og understellet under tilbageflyvningen. De drives af hydrazin der dog ikke brændes. Hydrazinen overgår til gasform ved hjælp af en katalysator på pulverform og bliver 927 °C varm. Hjælpeaggregaterne drosler ned 5 minutter efter landingen og gav stikflammerne, der er svære at se ved landinger om dagen.
 STS-123 opsendelsen.
STS-123 opsendelsen. Garrett Reisman på første rumvandring.
Garrett Reisman på første rumvandring. Richard Linnehan og Michael Foreman på anden rumvandring.
Richard Linnehan og Michael Foreman på anden rumvandring. Richard Linnehan på tredje rumvandring.
Richard Linnehan på tredje rumvandring. Robert Behnken på fjerde rumvandring.
Robert Behnken på fjerde rumvandring. Michael Foreman på femte rumvandring.
Michael Foreman på femte rumvandring. ISS efter STS-123
ISS efter STS-123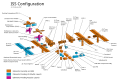 ISS efter STS-123 med kommende komponenter.
ISS efter STS-123 med kommende komponenter.
Hovedartikler:
| Wikimedia Commons har medier relateret til: |
Eksterne henvisninger
- STS-123 All Aboard for STS-123: The Station Goes Global Arkiveret 29. februar 2008 hos Wayback Machine NASA (engelsk)
- STS-123 Mission Information Arkiveret 29. juli 2009 hos Wayback Machine NASA (engelsk)
- About Kibo JAXA (engelsk)
- NASA TV (engelsk)
- ^ Kibo Japanese experiment module – Experiment Logistics Module (Pressurized Section) Arkiveret 23. april 2008 hos Wayback Machine JAXA (engelsk)
- ^ Traffic jam in space: ATV docking under tight schedule ESA (engelsk)
- ^ Timeline ESA (engelsk)
- ^ Endeavour launched from Florida BBC (engelsk)
- ^ Rumfærge skudt af sted på rekord-tur Arkiveret 13. marts 2008 hos Wayback Machine ing.dk
- ^ Endeavour on the Flip Side ReelNASA YouTobe (engelsk)
- ^ STS-123: Houston checking into strange ascent debris incident Arkiveret 14. marts 2008 hos Wayback Machine (engelsk)
- ^ "Endeavour indleder maraton-besøg på rumstationen". Arkiveret fra originalen 15. marts 2008. Hentet 17. marts 2008.
- ^ Rumfærgen landede sikkert i nattemørket Arkiveret 29. marts 2008 hos Wayback Machine ing.dk
Rumfærge Endeavour (OV-105) (Space Transportation System) missioner 1992 – 2011 | ||
|---|---|---|
| Missioner |  | |
| Hovedartikler |
|  |
|---|---|---|
| Rumfærger |
| |
| Opsendelsessteder | ||
| Landingssteder | ||
Medier brugt på denne side



(October 2006) --- Computer-generated artist’s rendering of the International Space Station after flight 1J/A. Kibo Japanese Experiment Lojism Module - Pressurized Section (ELM-PS) is installed on top of Node 2. Canadian Special Purpose Dexterous Manipulator (SPDM) - Dextre - is installed. (Credit: NASA)

Astronaut Mike Foreman, STS-123 mission specialist, helps to tie down the Orbiter Boom Sensor System on the International Space Station's S1 truss during EVA 5 on March 22. The structure at the end of the boom is a transmission device for laser imagery from the laser devices used for scanning the thermal protection system.

ISS Configuration post STS-122

{kind=link}

Astronaut Garrett Reisman, Expedition 16 flight engineer, participates in the mission's first scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the seven-hour and one-minute spacewalk, Reisman and astronaut Rick Linnehan (out of frame), STS-123 mission specialist, prepared the Japanese logistics module-pressurized section (JLP) for removal from Space Shuttle Endeavour's payload bay; opened the Centerline Berthing Camera System on top of the Harmony module; removed the Passive Common Berthing Mechanism and installed both the Orbital Replacement Unit (ORU) tool change out mechanisms on the Canadian-built Dextre robotic system, the final element of the station's Mobile Servicing System. Visible in the reflections in Reisman's visor are various components of the station and the docked Space Shuttle Endeavour.
STS-123 crew portrait. From the right (front row) are astronauts Dominic L. Gorie, commander; and Gregory H. Johnson, pilot. From the left (back row) are astronauts Richard M. Linnehan, Robert L. Behnken, Garrett E. Reisman, Michael J. Foreman and Japan Aerospace Exploration Agency's (JAXA) Takao Doi, all mission specialists.

Astronaut Robert L. Behnken, STS-123 mission specialist, participates in the mission's fourth scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the 6-hour, 24-minute spacewalk, Behnken and astronaut Mike Foreman (out of frame), mission specialist, replaced a failed Remote Power Control Module -- essentially a circuit breaker -- on the station's truss. The spacewalkers also tested a repair method for damaged heat resistant tiles on the space shuttle. This technique used a caulk-gun-like tool named the Tile Repair Ablator Dispenser to dispense a material called Shuttle Tile Ablator-54 into purposely damaged heat shield tiles. The sample tiles will be returned to Earth to undergo extensive testing on the ground.
SVG version of PNG Space Shuttle Logo/Patch.

Astronauts Rick Linnehan and Mike Foreman, both STS-123 mission specialists, participate in the mission's second scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the 7-hour, 8-minute spacewalk, Linnehan and Foreman, assembled the stick-figure-shaped Dextre, also known as the Special Purpose Dextrous Manipulator (SPDM), a task that included attaching its two arms. Designed for station maintenance and service, Dextre is capable of sensing forces and movement of objects it is manipulating. It can automatically compensate for those forces and movements to ensure an object is moved smoothly. Dextre is the final element of the station's Mobile Servicing System. The blackness of space and Earth's horizon provide the backdrop for the scene.

The STS-122 patch depicts the continuation of the voyages of the early explorers to today's frontier, space. The ship denotes the travels of the early expeditions from the east to the west. The space shuttle shows the continuation of that journey along the orbital path from west to east. A little more than 500 years after Columbus sailed to the new world, the STS-122 crew will bring the European laboratory module "Columbus" to the International Space Station to usher in a new era of scientific discovery.

Space shuttle Endeavour's drag chute unfurls in a kaleidoscope of color as the orbiter lands in darkness on Runway 15 at NASA Kennedy Space Center's Shuttle Landing Facility to end the STS-123 mission, a 16-day flight to the International Space Station.

Forfatter/Opretter: Penyulap, Licens: CC BY 3.0
Kibō (Hope) Layout including labels for all 6 components as defined by JAXA, from previous version of this image from NASA PD.
STS-123 continues assembly of the International Space Station (ISS). The primary mission objectives include rotating an expedition crew member and installing both the first component of the Japanese Experimental Module (the Experimental Logistics Module - Pressurized Section (ELM-PS)) and the Canadian Special Purpose Dexterous Manipulator (SPDM). In addition, STS-123 will deliver various spare ISS components and leave behind the sensor boom used for inspecting the shuttle's thermal protection system. A follow-on mission to ISS will utilize and then return home with this sensor boom. A total of five spacewalks are planned to accomplish these tasks. The mission will also require the use of both the shuttle and ISS robotic arms. STS-123 will utilize the Station-Shuttle Power Transfer System to extend the docked portion of the mission to eleven days, with a total planned duration of 15 days. The crew patch depicts the space shuttle in orbit with the crew names trailing behind. STS-123's major additions to ISS (the ELM-PS installation with the shuttle robotic arm and the fully constructed SPDM) are both illustrated. The ISS is shown in the configuration that the STS-123 crew will encounter when they arrive.

Emblem of Nasa's STS-124 mission.
- The STS-124/1J patch depicts the Space Shuttle Discovery docked with the International Space Station (ISS). STS-124/1J is dedicated to delivering and installing the Japanese Experiment Module (JEM) known as Kibo (Hope) to the ISS. The significance of the mission and the Japanese contribution to the ISS is recognized by the Japanese flag depicted on the JEM Pressurized Module (JPM) and the word Kibo written in Japanese at the bottom of the patch. The view of the sun shining down upon the Earth represents the increased "hope" that the entire world will benefit from the JEM's scientific discoveries. The JPM will be the largest habitable module on the ISS and is equipped with its own airlock and robotic arm for external experiments. In addition to delivering and installing the JPM, the STS-124 crew will relocate the JEM Logistics Pressurized (JLP) module to its permanent home on the zenith side of the JPM. During three planned space walks, the crew will perform external ISS maintenance and JPM outfitting, as well as extensive robotic operations by the ISS, space shuttle, and JEM robotic arms. It will be the first time that three different robotic arms will be operated during a single space flight mission.
.svg)
Forfatter/Opretter: Kwamikagami, Licens: CC BY-SA 4.0
symbol of Mars. 16 × 16 pixel nominal dimensions, lines 2 pixel thick, square caps. Colour 75% blue: red=0 green=0 blue=191 (#0000BF).
The Space Shuttle Endeavour shortly before docking with the International Space Station on NASA mission STS-111.
The Space Shuttle Endeavour approaches the International Space Station (ISS) in this digital still camera's view, recorded on June 7, 2002. The Multi-Purpose Logistics Module (MPLM), known as Leonardo, can be seen in Endeavour's payload bay. Two Russian cosmonauts and an American astronaut, currently onboard the shuttle, will replace two American astronauts and a Russian cosmonaut now on the station.

Astronaut Rick Linnehan, STS-123 mission specialist, participates in the mission's third scheduled session of extravehicular activity (EVA) as construction and maintenance continue on the International Space Station. During the 6-hour, 53-minute spacewalk, Linnehan and astronaut Robert L. Behnken (out of frame), mission specialist, installed a spare-parts platform and tool-handling assembly for Dextre, also known as the Special Purpose Dextrous Manipulator (SPDM). Among other tasks, they also checked out and calibrated Dextre's end effector and attached critical spare parts to an external stowage platform. The new robotic system is scheduled to be activated on a power and data grapple fixture located on the Destiny laboratory on flight day nine.